

طراحی شهری و محیطی
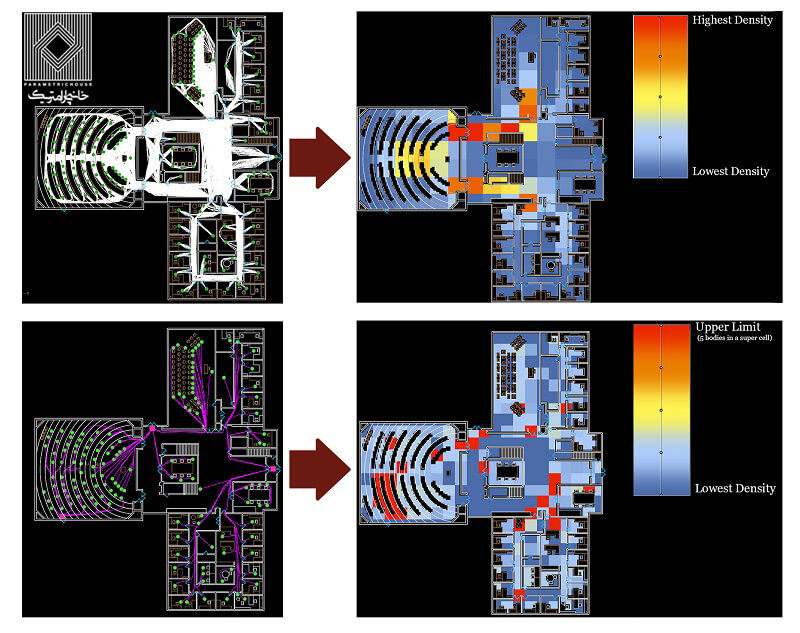
MOUSE تولید شده توسط آرش نادر، پلاگینی مسیریاب در محیط Grasshopper بر مبنای الگوریتم Theta* می باشد. الگوریتمی که توسط Kenny Daniel، Alex Nash و Sven Koenig نوشته شده است. این افزونه امکان یافتن مسیرهای دید بهینه و واقعی میان هر دو نقطه در محیط گرس هاپر را فراهم می نماید.
اطلاعات بیشتر در مورد الگوریتم Theta* را می توانید در مقاله:
https://arxiv.org/ftp/arxiv/papers/1401/1401.3843.pdf
بخوانید.
نظرات